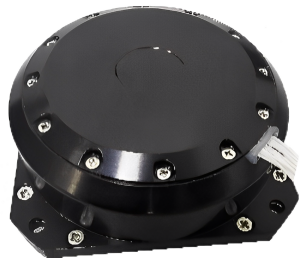
Gyroscope laser de type 58




CARACTÉRISTIQUES DU PRODUIT
● Performances à coût très élevé
● Le capteur de température intégré peut être utilisé pour compenser les paramètres du gyroscope en temps réel
●Avec un connecteur électrique à 25 broches, le gyroscope produit deux signaux numériques de niveau TTL, qui peuvent être connectés aux circuits d'identification de phase, de démodulation et de comptage pour obtenir les signaux de déplacement angulaire requis.
●Utilisation d'une alimentation +15V, +5V et -5V DC
ZONE D'APPLICATION
● Compas de plate-forme marine
● Référence locale
● Missiles tactiques à moyenne portée
●Système de positionnement et d'orientation de précision moyenne
● Hélicoptère
●Systèmes d'attitude
● Artillerie automotrice, torpilles, etc.
DES INDICATEURS DE PERFORMANCE
|
| Classe 1 | Classe 2 | Classe 3 |
| Stabilité zéro biais | ≤ 0.01º/h | ≤ 0.015º/h | ≤ 0.02º/heure |
| Répétabilité sans biais | ≤ 0.01º/h | ≤ 0.015º/h | ≤ 0.02º/heure |
| Balade aléatoire | ≤ 0.002º/√h | ≤ 0.003º/√h | ≤ 0.005º/√h |
| Facteur d'échelle | ≤ 5ppm(1σ) | ||
| Sensibilité au champ magnétique | ≤ 0,004 º/h /Gs | ||
| Plage dynamique | ≤ ±400°/S | ||
| Le temps de démarrage | ≤10 秒 | ||
| MTBF | >20000小时 | ||
| Température de fonctionnement | -40℃~+65℃ | ||
| Dimension | (85±2)×(75±2)×(52±2)(mm) | ||
| Poids | 620±20(g) | ||
| Consommation d'énergie | < 5W | ||
| Choc | 75g, 6ms (demi-sinus) | ||
| Vibration | ≤ 9.5g (1300Hz~1500Hz est le point de résonance du gyroscope, et le point de résonance des gyroscopes de type A, B et C est réduit dans l'ordre, ce qui doit être évité dans la conception structurelle du système de guidage inertiel.) | ||