Système de navigation inertielle Strapdown à fibre de type 50




Description du produit
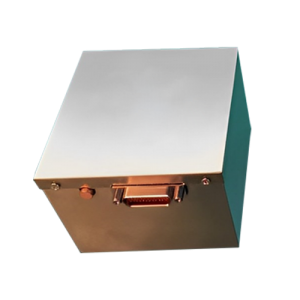
Système de navigation intégré à fibre optique de type 50, une solution de pointe méticuleusement conçue pour offrir des performances inégalées.Ce système comprend un gyroscope à fibre optique à boucle fermée intégré compact et léger, un accéléromètre et une carte de guidage, offrant une rentabilité exceptionnelle.Tirant parti d'algorithmes avancés de fusion et de navigation multi-capteurs, il fournit des mesures précises des informations d'attitude, de cap et de position avec une précision remarquable.
Conçu dans un souci de polyvalence, le système Type 50 trouve son application parfaite dans les systèmes de mesure mobiles de moyenne à haute précision et les véhicules aériens sans pilote (UAV) de taille moyenne à grande.Son intégration transparente et ses performances fiables en font un atout inestimable pour diverses industries, notamment l'arpentage, la cartographie, la photographie aérienne, etc.
Découvrez le summum de la technologie de navigation avec le système de navigation intégré à fibre optique Type 50, qui vous permet d'atteindre de nouveaux niveaux de précision et d'efficacité dans vos opérations.
FONCTION PRINCIPALE
Le système offre un mode de navigation combiné inertiel/satellite et un mode inertiel pur.
En mode de navigation intégrée inertielle/satellite, le récepteur GNSS interne utilise les informations de positionnement par satellite pour la navigation intégrée et produit les informations de tangage, de roulis, de cap, de position, de vitesse et de temps du porteur.Lorsque le signal est perdu, la sortie inclut la position, la vitesse et l'attitude calculées par inertie, avec l'exigence de maintenir un tangage et un roulis précis, ainsi qu'une fonction de maintien de cap à court terme et une précision de positionnement au niveau du mètre.
Le mode inertiel pur (aucune fusion GPS ne se produit après la mise sous tension, et si le verrouillage est à nouveau perdu après la fusion, il entre dans le mode de navigation intégré) dispose d'une fonction de mesure d'attitude précise et peut produire le tangage, le roulis, le cap et effectuer une recherche statique du nord basé sur l'inertie pure.
INDEX DES PERFORMANCES
| Projet | Condition de test | Indice |
| Précision de positionnement | Le GNSS fonctionne, à la carte | 1,5 m |
| GNSS est valide, RTK | 2 cm + 1 ppm | |
| Positionnement horizontal inertiel pur (efficacité d'alignement) | 80m/5min(CEP) 500m/10min(CEP) 1.5nm/30min (CEP) | |
| Maintien du positionnement horizontal de la combinaison de vitesse anémométrique (il est utilisé à bord et il y a une manœuvre de virage avant la combinaison de vitesse anémométrique. Le test prend comme exemple une vitesse de vol de 150 km/h et le champ de vent est stable) | 0,8 nm/30 min (CEP) | |
| Précision du parcours | Antenne unique (RMS) | 0,1° (conditions du véhicule, nécessité de manœuvrer) |
| Double antenne (RMS) | 0,2°/L (L est la longueur de la ligne de base) (RMS) | |
| Maintien de cap (RMS) | 0.2°/30min (RMS),0.5°/h | |
| Précision du nord auto-recherche (RMS) | 0.2°SecL, double alignement pendant 15min 1.0°SecL, unité pendant 5-10 minutes | |
| Précision d'attitude | GNSS valide | 0,02° (RMS) |
| Rétention d'attitude (panne GNSS) | 0.2°/30min (RMS),0.5°/h (RMS) | |
| Précision de vitesse | GNSS valide, point unique L1/L2 | 0,1 m/s (RMS) |
| Gyroscope | Plage de mesure | ±400°/s |
| Stabilité zéro biais | ≤0.3°/h | |
| Accéléromètre | Plage de mesure | ±20g |
| Stabilité zéro biais | ≤100µg | |
| Dimensions physiques et caractéristiques électriques | Tension | 9-36V CC |
| Consommation d'énergie | ≤12W (état stable) | |
| I Interface | 2 canaux RS232, 1 canal RS422, 1 canal PPS (niveau LVTTL/422) | |
| Dimension | 92,0 mm × 92,0 mm × 90,0 mm | |
| Caractéristiques environnementales | Température de fonctionnement | -40℃~+60℃ |
| Température de stockage | -45℃~+70℃ | |
| Vibration | 5 ~ 2000 Hz, 6,06 g (avec absorption des chocs) | |
| Impact | 30g, 11ms (avec absorption des chocs) | |
| Durée de vie | >15 ans | |
| Temps de travail continu | >24h |